Tan capaces como los robots, los animales originales después de los cuales tienden a ser diseñados siempre son mucho, mucho mejores. Eso se debe en parte a que es difícil aprender a caminar como un perro directamente desde un perro, pero esta investigación de los laboratorios de IA de Google hazlo considerablemente más fácil.
El objetivo de esta investigación, una colaboración con UC Berkeley, era encontrar una manera de transferir de manera eficiente y automática "comportamientos ágiles" como un trote o giro ligero desde su origen (un buen perro) a un robot cuadrúpedo. Este tipo de cosas se han hecho antes, pero como señala la publicación del blog de los investigadores, el proceso de capacitación establecido a menudo puede "requerir una gran cantidad de información experta, y a menudo implica un largo proceso de ajuste de recompensas para cada habilidad deseada".
Eso no escala bien, naturalmente, pero esa sintonización manual es necesaria para asegurarse de que el robot se aproxima bien a los movimientos del animal. Incluso un robot muy parecido a un perro no es realmente un perro, y la forma en que se mueve un perro puede no ser exactamente la forma en que el robot debería hacerlo, lo que lleva a este último a caerse, encerrarse o fallar de otra manera.
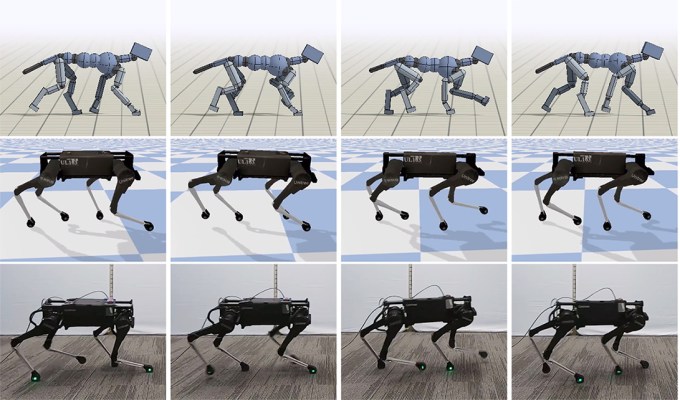
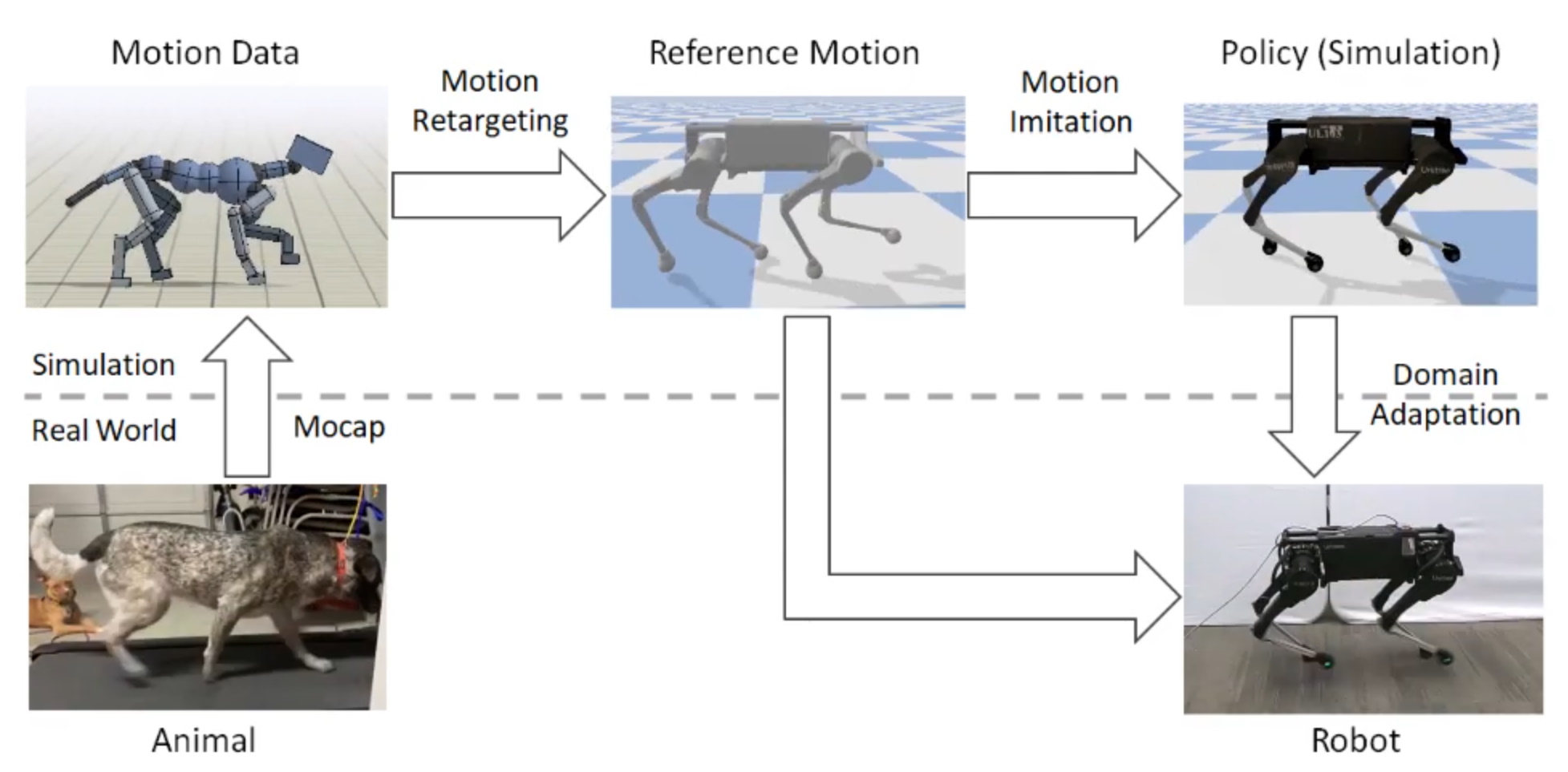 El proyecto de Google AI aborda esto agregando un poco de caos controlado al orden normal de las cosas. Normalmente, se capturarían los movimientos del perro y se rastrearían cuidadosamente los puntos clave como pies y articulaciones. Estos puntos se aproximarían a los del robot en una simulación digital, donde una versión virtual del robot intenta imitar los movimientos del perro con los suyos, aprendiendo a medida que avanza.
El proyecto de Google AI aborda esto agregando un poco de caos controlado al orden normal de las cosas. Normalmente, se capturarían los movimientos del perro y se rastrearían cuidadosamente los puntos clave como pies y articulaciones. Estos puntos se aproximarían a los del robot en una simulación digital, donde una versión virtual del robot intenta imitar los movimientos del perro con los suyos, aprendiendo a medida que avanza.
Hasta ahora, todo bien, pero el verdadero problema surge cuando intentas usar los resultados de esa simulación para controlar un robot real. El mundo real no es un plano 2D con reglas de fricción idealizadas y todo eso. Desafortunadamente, eso significa que los pasos basados en simulación no corregidos tienden a llevar a un robot directamente al suelo.
Para evitar esto, los investigadores introdujeron un elemento de aleatoriedad en los parámetros físicos utilizados en la simulación, haciendo que el robot virtual pese más, tenga motores más débiles o experimente una mayor fricción con el suelo. Esto hizo que el modelo de aprendizaje automático que describe cómo caminar tiene que tener en cuenta todo tipo de pequeñas variaciones y las complicaciones que crean en el futuro, y cómo contrarrestarlas.
 Aprender a adaptarse a esa aleatoriedad hizo que el método de caminar aprendido fuera mucho más robusto en el mundo real, lo que condujo a una imitación aceptable del paseo del perro objetivo, e incluso movimientos más complicados como giros y vueltas, sin ninguna intervención manual y solo un poco más virtual formación.
Aprender a adaptarse a esa aleatoriedad hizo que el método de caminar aprendido fuera mucho más robusto en el mundo real, lo que condujo a una imitación aceptable del paseo del perro objetivo, e incluso movimientos más complicados como giros y vueltas, sin ninguna intervención manual y solo un poco más virtual formación.
Naturalmente, se podrían agregar ajustes manuales a la mezcla si se desea, pero tal como están las cosas, esta es una gran mejora con respecto a lo que anteriormente se podía hacer de forma totalmente automática.
En otro proyecto de investigación descrito en la misma publicación, otro grupo de investigadores describe un robot que se enseña a sí mismo a caminar por sí mismo, pero que posee la inteligencia para evitar caminar fuera de su área designada y levantarse cuando cae. Con esas habilidades básicas integradas, el robot pudo deambular continuamente por su área de entrenamiento sin intervención humana, aprendiendo habilidades de locomoción bastante respetables.
El documento sobre el aprendizaje de comportamientos ágiles de los animales se puede leer aquí, mientras que el de robots aprendiendo a caminar por su cuenta (una colaboración con Berkeley y el Instituto de Tecnología de Georgia) es aquí.