Hemos visto cómo un perro robot cuadrúpedo puede driblar una pelota, escalar paredes, correr sobre la arena y abrir puertas con sus “patas”. La última prueba no es necesariamente la del movimiento, sino la del equilibrio. Esta vez, los investigadores de Instituto de Robótica de la Universidad Carnegie Mellon han encontrado una manera de hacer que un robot cuadrúpedo listo para usar sea lo suficientemente ágil y estable como para caminar sobre una barra de equilibrio.
Incluso para los humanos, la barra de equilibrio es toda una hazaña para conquistar, algo que pone nerviosos incluso a los gimnastas. “Es el gran ecualizador”, dijo la entrenadora de gimnasia femenina de Michigan, Beverly Plocki, al Chicago Tribune
[Related:
But in robot dogs, their legs aren’t exactly coordinated. If three feet can touch the ground, generally they are fine, but reduce that to one or two robot feet and you’re in trouble. “With current control methods, a quadruped robot’s body and legs are decoupled and don’t speak to one another to coordinate their movements,” Zachary Manchester, an assistant professor in the Robotics Institute and head of the Robotic Exploration Lab, said in a statement
How CMU’s scientists managed to get a robot to daintily scale a narrow beam—the first time this has been done, so the researchers claim—is by leveraging hardware often used on spacecrafts: a reaction wheel actuator. This system helps the robot balance wherever its feet are, which is pretty helpful in lieu of something like a tail or a flexible spine which helps actual four-legged animals catch their balance.
[Related: This bumblebee-inspired bot can bounce back after injuring a wing.]
“Básicamente tienes un gran volante con un motor adjunto”, dijo Manchester. “Si giras el volante pesado en un sentido, hace que el satélite gire en el otro sentido. Ahora toma eso y ponlo en el cuerpo de un robot cuadrúpedo.
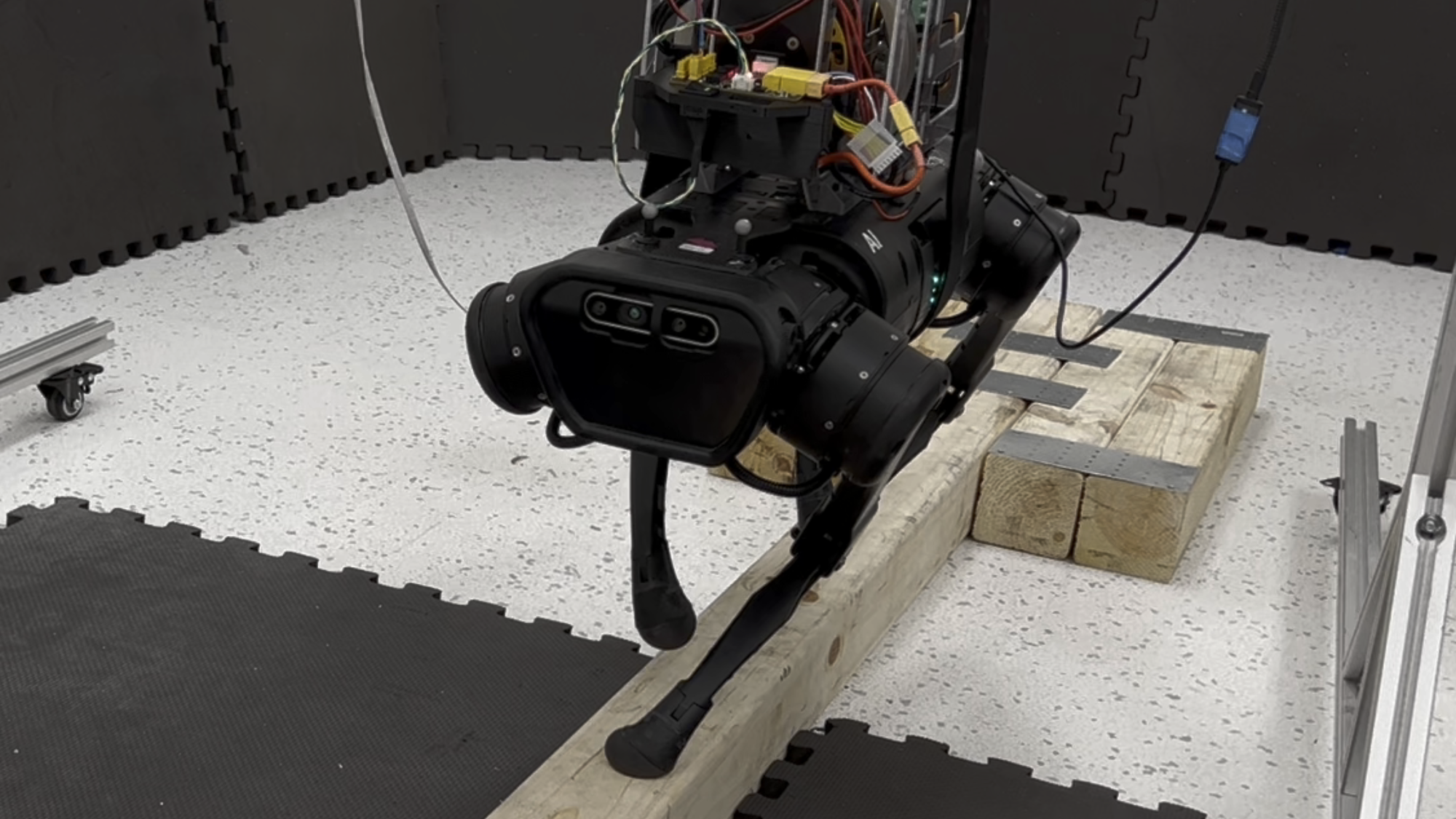
El equipo montó dos actuadores de rueda de reacción en el eje de cabeceo y balanceo de un robot comercial Unitree A1, para que el pequeño robot pudiera equilibrarse sin importar dónde estuvieran sus pies. Luego, hicieron dos pruebas de destreza: la primera lo dejaron caer boca abajo desde aproximadamente medio metro en el aire. Como un gato, el robot pudo darse la vuelta y aterrizar sobre sus pies.
En segundo lugar vino la prueba de la barra de equilibrio, esta vez haciendo que el robot caminara a lo largo de una barra de equilibrio de seis centímetros de ancho, lo que el robot hizo con la gracia de una bailarina. Esto podría ser útil en el futuro, no solo por su valor puramente de entretenimiento, sino también para maniobrar escenarios complicados en el caso de búsqueda y rescate, que a menudo es un objetivo para el desarrollo en todo tipo de robots. El equipo estará mostrando su último esfuerzo en el Conferencia Internacional de Robótica y Automatización 2023 este verano en Londres.