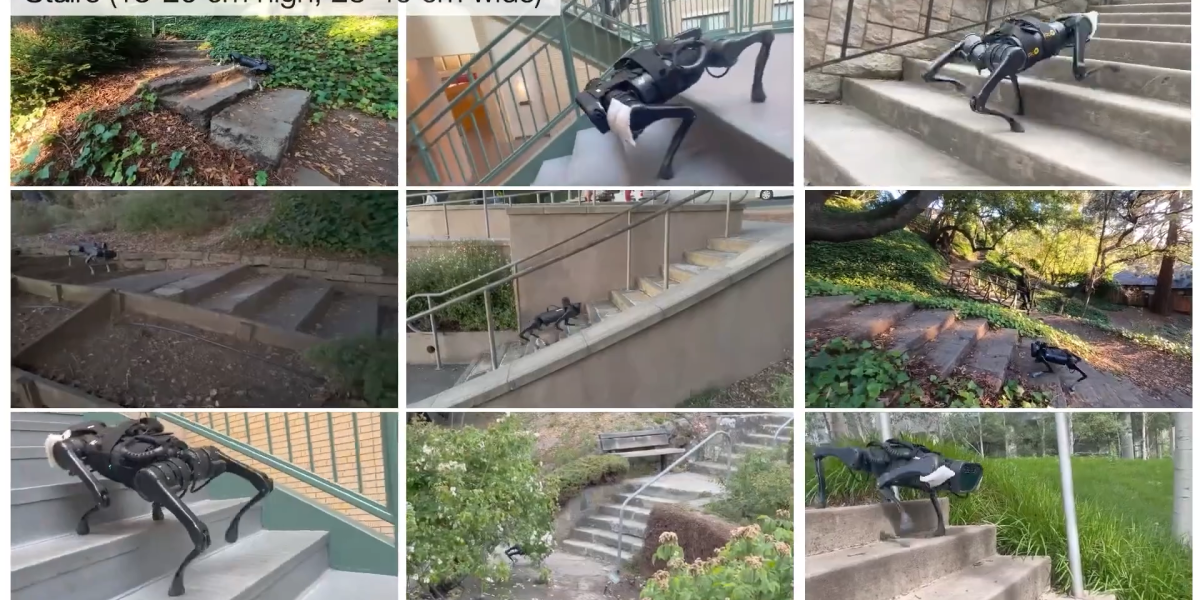
A diferencia de los robots existentes en el mercado, como el de Boston Dynamics Lugar, que se mueve usando mapas internos, este robot usa cámaras solo para guiar sus movimientos en la naturaleza, dice Ashish Kumar, estudiante graduado en UC Berkeley, quien es uno de los autores de un artículo que describe el trabajo; está previsto que se presente en el Conferencia sobre Aprendizaje de Robots próximo mes. Otros intentos de utilizar las señales de las cámaras para guiar el movimiento del robot se han limitado a terreno plano, pero lograron que su robot subiera escaleras, trepara piedras y saltara huecos.

CORTESÍA DE LOS INVESTIGADORES
El robot de cuatro patas primero se entrena para moverse en diferentes entornos en un simulador, por lo que tiene una idea general de cómo es caminar en un parque o subir y bajar escaleras. Cuando se implementa en el mundo real, las imágenes de una sola cámara en la parte delantera del robot guían su movimiento. El robot aprende a ajustar su forma de andar para navegar por cosas como escaleras y terrenos irregulares mediante el aprendizaje por refuerzo, una técnica de IA que permite que los sistemas mejoren mediante prueba y error.
Eliminar la necesidad de un mapa interno hace que el robot sea más robusto, porque ya no está limitado por posibles errores en un mapa, dice Deepak Pathak, profesor asistente en Carnegie Mellon, que formó parte del equipo.
Es extremadamente difícil para un robot traducir los píxeles sin procesar de una cámara en el tipo de movimiento preciso y equilibrado necesario para navegar por su entorno, dice Jie Tan, científico investigador de Google, que no participó en el estudio. Él dice que el trabajo es la primera vez que ve un robot pequeño y de bajo costo demostrar una movilidad tan impresionante.
El equipo ha logrado un “gran avance en el aprendizaje y la autonomía de los robots”, dice Guanya Shi, investigadora de la Universidad de Washington que estudia el aprendizaje automático y el control robótico, que tampoco participó en la investigación.
Akshara Rai, científica investigadora de Facebook AI Research que trabaja en aprendizaje automático y robótica, y que no participó en este trabajo, está de acuerdo.
“Este trabajo es un paso prometedor hacia la construcción de robots con patas tan perceptivas y su implementación en la naturaleza”, dice Rai.
Sin embargo, si bien el trabajo del equipo es útil para mejorar la forma en que camina el robot, no ayudará al robot a saber adónde ir por adelantado, dice Rai. “La navegación es importante para implementar robots en el mundo real”, dice.
Se necesita más trabajo antes de que el perro robot pueda brincar por los parques o buscar cosas en la casa. Si bien el robot puede comprender la profundidad a través de su cámara frontal, no puede hacer frente a situaciones como suelo resbaladizo o hierba alta, dice Tan; podría pisar charcos o atascarse en el barro.