Al viajar por caminos accidentados e impredecibles, cuantas más piernas, mejor, al menos para los robots. Equilibrarse en dos piernas es algo duro; en cuatro patas, es un poco más fácil. Pero, ¿y si tuvieras muchas piernas, como un ciempiés? Investigadores del Instituto de Tecnología de Georgia descubrieron que al darle a un robot múltiples patas conectadas, le permite a la máquina trepar fácilmente sobre paisajes con grietas, colinas y superficies irregulares sin la necesidad de extensos sistemas de sensores que de otro modo lo habrían ayudado a navegar su ambiente. Sus resultados se publican en un estudio esta semana en la revista Ciencia
El equipo ha trabajado previamente modelando el movimiento de estos bichos espeluznantes. En este nuevo estudio, crearon un marco para operar este robot parecido a un ciempiés que fue influenciado por la teoría de la comunicación del matemático Claude Shannon, que postula que al transmitir una señal entre dos puntos, para evitar el ruido, es mejor dividir el mensaje en unidades discretas y repetitivas.
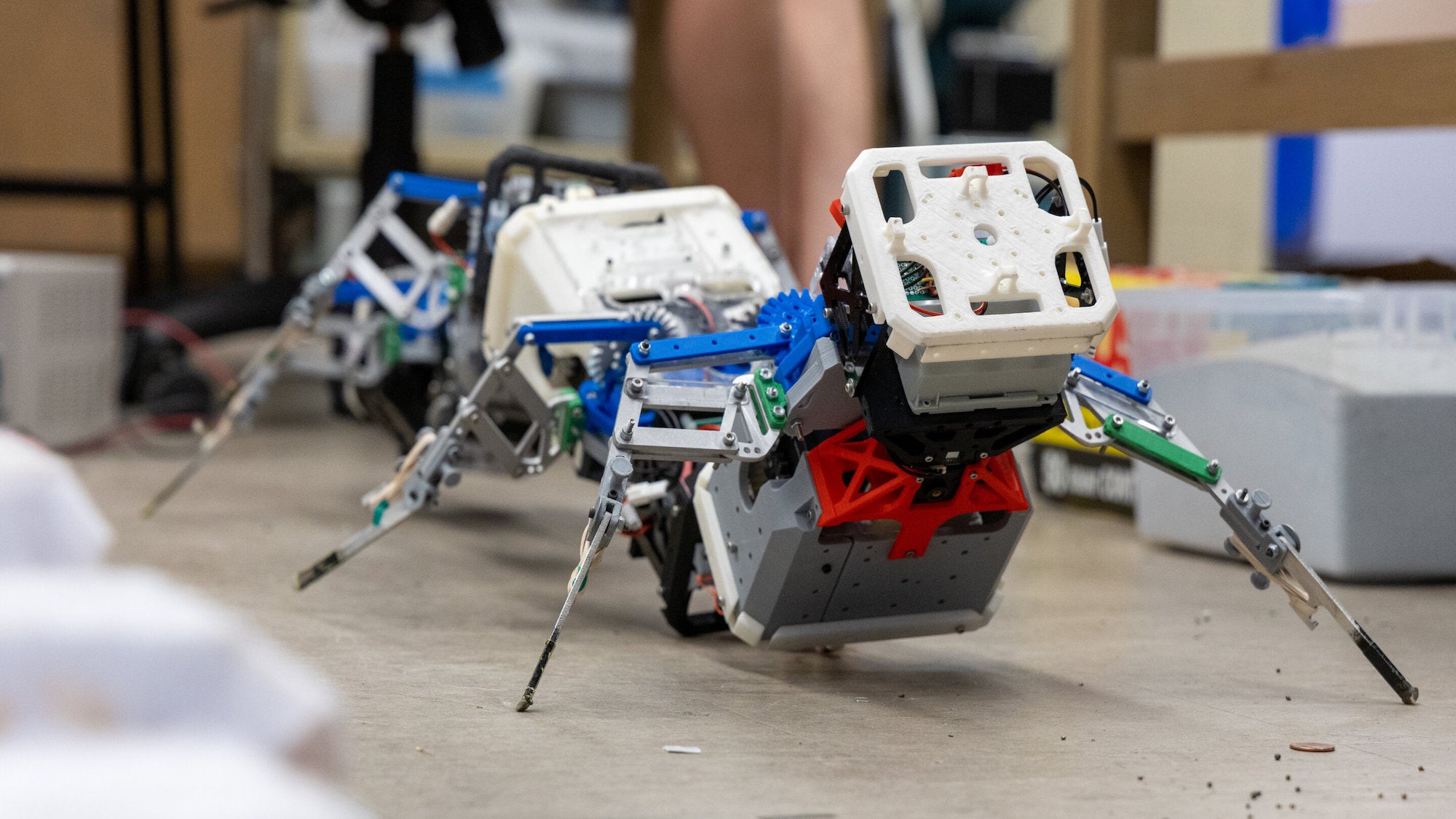
“Esta teoría nos inspiró y tratamos de ver si la redundancia podría ser útil en el transporte de materia”, dijo Baxi Chong, investigador postdoctoral en física, en un comunicado. comunicado de prensa. Su creación es un robot con partes unidas como un modelo de tren con dos piernas que sobresalen de cada segmento que podría permitirle “caminar”. La idea es que después de que se les diga que vayan a un destino determinado, en el camino, estas piernas harían contacto con una superficie y enviarían información sobre el terreno a los otros segmentos, que luego ajustarían el movimiento y la posición en consecuencia. El equipo lo sometió a una serie de pruebas informáticas y en el mundo real para ver cómo caminaba, qué tan rápido podía ir y cómo se desempeñaba en césped, bloques y otras superficies irregulares.
[Related: How a dumpy, short-legged bird could change water bottle designs]
“Un valor de nuestro marco radica en su codificación de los beneficios de la redundancia, que conducen a la robustez locomotora sobre los errores de contacto ambiental sin necesidad de detección”, escribieron los investigadores en el artículo. “Esto contrasta con el paradigma prevaleciente de prevención de errores de contacto en los controles de circuito cerrado basados en sensores convencionales que aprovechan la información visual, táctil o de torsión articular del entorno para cambiar la dinámica del robot”.
Repitieron el experimento con robots que tenían diferente número de patas (seis, 12 y 14). En el trabajo futuro con el robot, los investigadores dijeron que quieren perfeccionar la búsqueda de la cantidad óptima de patas para darle a su ciempiés-bot para que pueda moverse sin problemas de la manera más rentable posible.
“Con un robot bípedo avanzado, normalmente se requieren muchos sensores para controlarlo en tiempo real”, dijo Chong. “Pero en aplicaciones como búsqueda y rescate, exploración de Marte o incluso micro robots, existe la necesidad de conducir un robot con detección limitada”.