Cuando pensamos en robots, normalmente pensamos en engranajes toscos, piezas mecánicas y movimientos bruscos. Pero una nueva generación de robots ha buscado romper ese molde.
Desde que el dramaturgo checo Karel Čapek acuñó por primera vez el término “robot” en 1920, estas máquinas han evolucionado en muchas formas y tamaños. Los robots ahora pueden ser duros, blandos, grandes, microscópicos, incorpóreos o parecidos a los humanos, con articulaciones controladas por una gama de motores no convencionales como campos magnéticos, aire o luz.
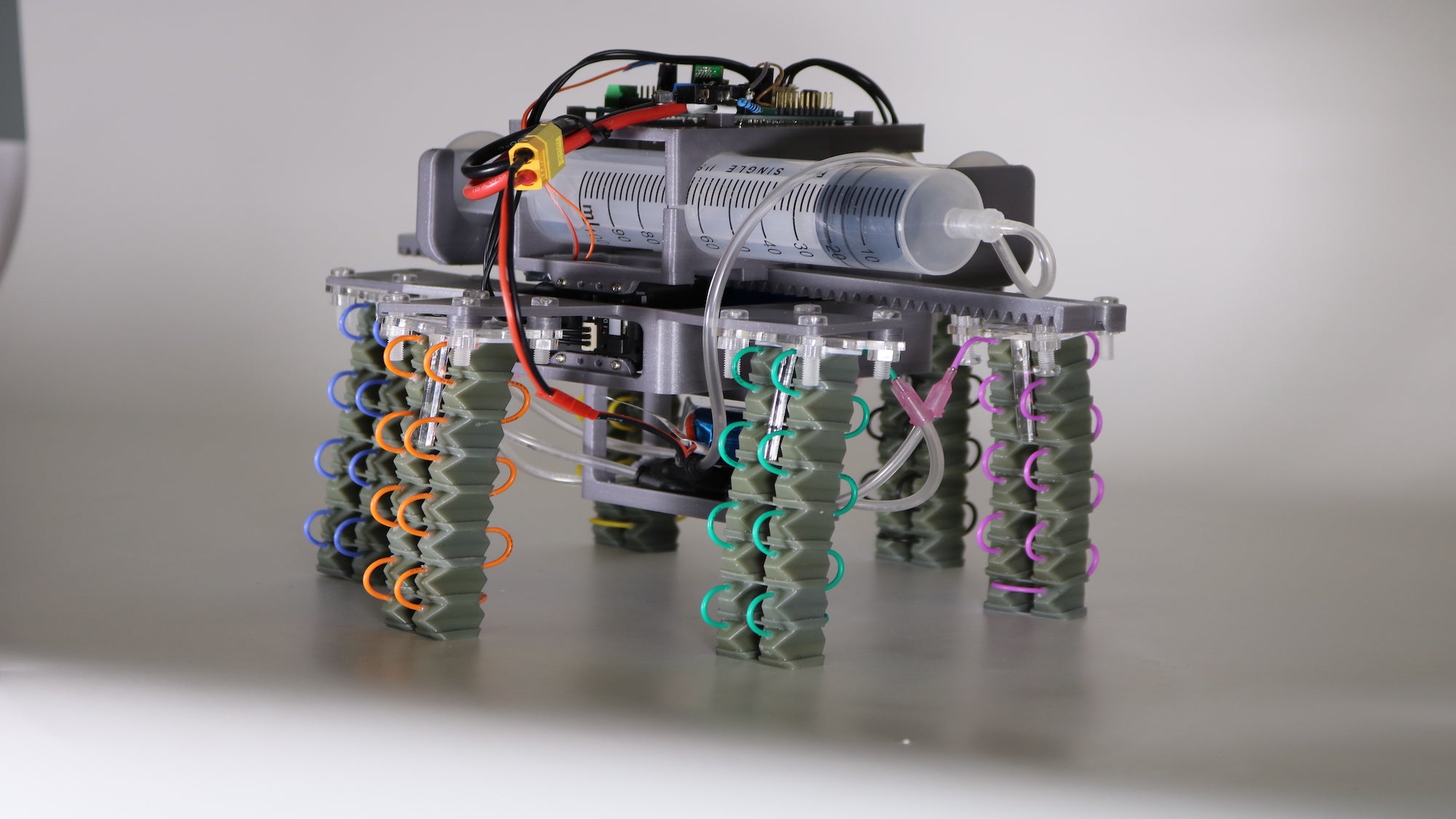
Un nuevo robot blando de seis patas de un equipo de ingenieros de la Universidad de Cornell ha puesto su propio giro en movimiento, utilizando motores impulsados por fluidos para lograr movimientos complejos. El resultado: un artilugio independiente similar a un insecto que lleva una mochila con un controlador Arbotix-M alimentado por batería y dos bombas de jeringa en la parte superior. Las jeringas bombean líquido hacia adentro y hacia afuera de las extremidades del robot a medida que avanza por una superficie a una velocidad de 0,05 longitudes corporales por segundo. El diseño del robot se describió en detalle en un artículo publicado en la revista Sistemas Inteligentes Avanzados

El robot nació de Cornell’s Laboratorio de Inteligencia Colectiva Incorporada, que explora formas en que los robots pueden pensar y recopilar información sobre el medio ambiente con otras partes de su cuerpo fuera de un “cerebro” central, algo así como un pulpo. Al hacer esto, el robot se basaría en su versión de reflejos, en lugar de un cálculo pesado, para calcular qué hacer a continuación.
[Related: This magnetic robot arm was inspired by octopus tentacles]
Para construir el robot, el equipo creó seis patas de silicona ahuecadas. Dentro de las patas hay fuelles llenos de líquido (imagínese el interior de un acordeón) y tubos de interconexión dispuestos en un sistema cerrado. Los tubos alteran la viscosidad del fluido que fluye en el sistema, contorsionando la forma de las piernas; la geometría de la estructura del fuelle permite que el fluido de la jeringa entre y salga de formas específicas que ajustan la posición y la presión dentro de cada pierna, haciendo que se extiendan rígidamente o se desinflen hasta su estado de reposo. La coordinación de diferentes combinaciones alternas de presión y posición crea un programa cíclico que hace que las piernas y el robot se muevan.
De acuerdo a un presione soltarYoav Matia, investigador postdoctoral en Cornell y autor del estudio, “desarrolló un modelo descriptivo completo que podía predecir los posibles movimientos del actuador y anticipar cómo las diferentes presiones de entrada, geometrías y configuraciones de tubos y fuelles los logran, todo con un solo entrada de fluidos”.
Debido a la flexibilidad de estas juntas de goma, el robot también puede cambiar su modo de andar, o estilo de caminar, según el paisaje o la naturaleza de los obstáculos que atraviesa. Los investigadores dicen que la tecnología detrás de estos motores basados en fluidos y extremidades ágiles se puede aplicar a una variedad de otras aplicaciones, como máquinas impresas en 3D y brazos robóticos.