Los ingenieros robóticos no son ajenos a recurrir a la naturaleza en busca de inspiración. En los últimos años, aves, perros, criaturas marinas extintas e incluso los propios humanos han servido como punto de partida para nuevos diseños mecánicos. Ahora, investigadores de Stanford están citando a la araña Harvestman, más conocida como papá de patas largas, como inspiración para un nuevo diseño de robot que creen que podría estar mejor equipado para navegar por cavernas rocosas irregulares y tubos de lava. Esperan que algún día este diseño con forma de araña pueda incluso ayudar a los robots a navegar por las cavernas heladas de la Luna y Marte.
¿Cómo funciona el robot araña?
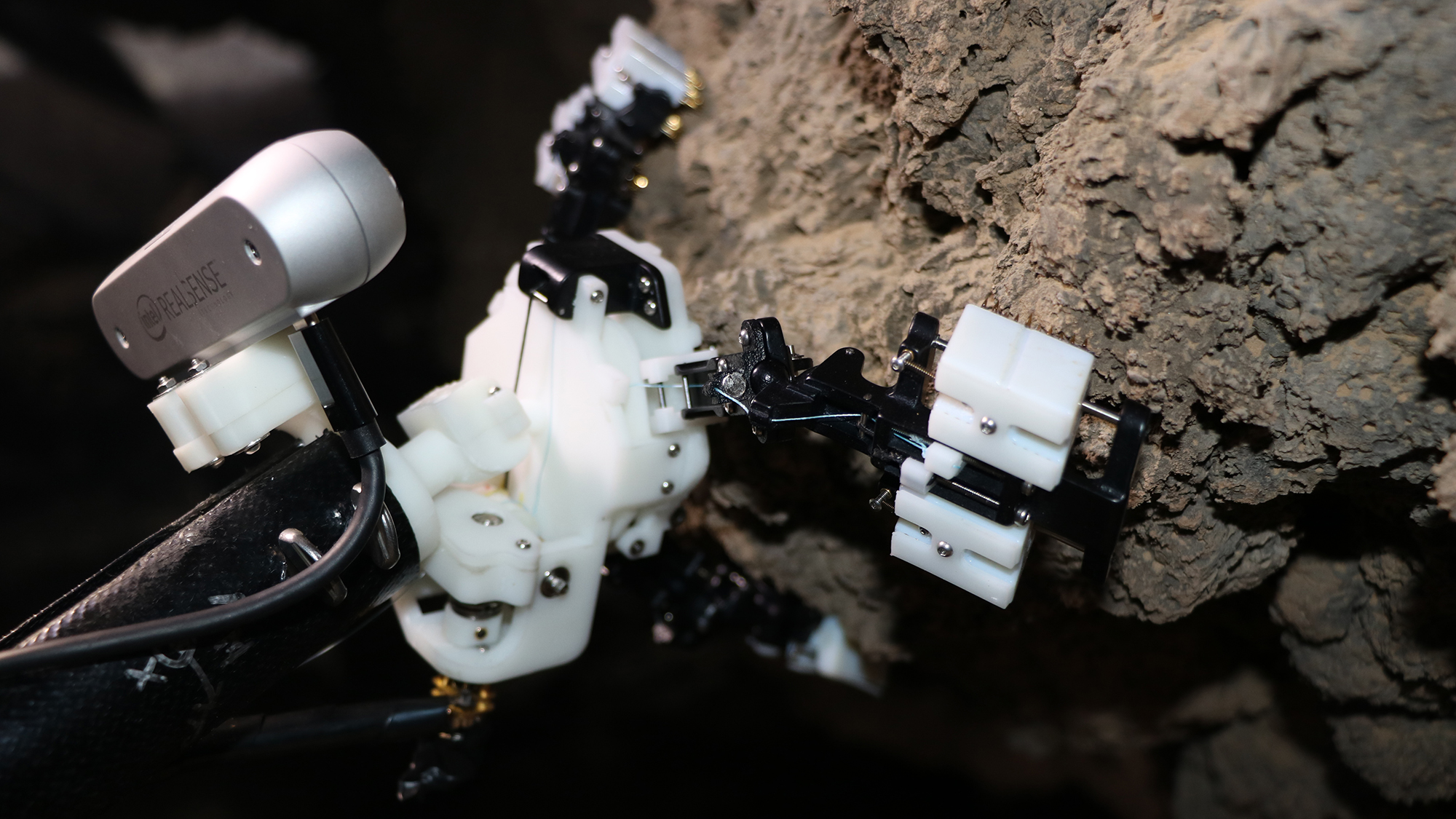
Los investigadores presentaron su nueva máquina llamada “ReachBot” en un artículo publicado hoy en la revista Robótica científica. ReachBot cuenta con múltiples brazos extensibles que puede usar para alcanzar rocas e impulsarse hacia adelante. Cada extremidad viene sujeta con una pinza de tres dedos que se agarra a las rocas y las utiliza como puntos de anclaje. El diseño de patas largas significa que las extremidades del robot pueden potencialmente acceder al suelo, el techo y las paredes de un tubo de lava o una cueva, lo que a su vez proporciona una mayor influencia. Este posicionamiento único, escriben los investigadores, permite al ReachBot “asumir una amplia variedad de posibles configuraciones, posturas de refuerzo y opciones de aplicación de fuerza”.

ReachBot intenta llenar un vacío de factor de forma entre los robots de exploración existentes. Los investigadores argumentan que los robots pequeños son útiles para navegar a través de pasillos estrechos, pero normalmente tienen un alcance limitado. Los robots más grandes, por el contrario, podrían alcanzar más áreas, pero pueden quedar atascados por su gran masa y complejidad mecánica. ReachBot ofrece un compromiso al confiar en un cuerpo principal pequeño con extremidades que pueden expandirse y extenderse si es necesario.
El robot utiliza un conjunto de sensores a bordo para escalar el área que tiene delante y buscar rocas cóncavas u otras señales que sugieran un área comprensible. Como una araña física. ReachBot no asume inmediatamente que las superficies de las rocas sean planas, sino que busca “características redondeadas que la pinza pueda encerrar parcialmente”. Los investigadores dicen que probaron el robot en simulación para ayudarlo a mejorar su capacidad para identificar correctamente áreas de superficie agarrables y ayudar en la planificación de pasos. Después de la simulación, ReachBot se probó en el mundo real en un tubo de lava no tripulado cerca del cráter Pisgah en el desierto de Mojave.
“Los resultados de la prueba de campo confirman las predicciones de las fuerzas máximas de agarre y subrayan la importancia de identificar y dirigirse hacia las características convexas de la roca que proporcionan un fuerte agarre”, escriben los investigadores. “También resaltan una característica de la planificación de agarre con ReachBot, que es que identificar, apuntar y extender brazos implica un mayor nivel de compromiso que agarrar objetos en escenarios de fabricación”.
ReachBot podría ayudar a los investigadores a explorar cuevas y cavernas profundas en otros planetas
Los investigadores creen que el diseño arácnido de ReachBot podría tener aplicaciones extraterrestres. Los tubos de lava, como los del desierto de Mojave, donde se probó el robot, eliminan parte del área de la superficie de la Luna y Marte. En el último ejemplo, los investigadores dicen que los antiguos ambientes subterráneos del Planeta Rojo permanecen relativamente sin cambios en el momento en que algunos creen que el planeta pudo haber sido habitable. Estas áreas de cavernas protegidas, escriben, “podrían proporcionar sitios para la futura habitación humana”.
En teoría, los futuros robots espaciales exploratorios podrían utilizar un diseño como el de ReachBot para explorar más profundamente áreas que los robots contemporáneos podrían encontrar inaccesibles. En otros lugares, los investigadores están explorando cómo máquinas saltadoras de tres patas y robots de cuatro patas inspirados en perros podrían ayudar de manera similar a los científicos a aprender más sobre áreas no descubiertas de nuestros vecinos del sistema solar.